Today, Livox officially releases another blockbuster product to the automobile mass production market, Livox’s first automotive-grade lidar HAP.
3DマッピングでのLivox LiDARの優れた可能性を示すデモンストレーションとして、Livox LiDARをドローンに統合してマッピング作業を実施する方法をご紹介します。マッピング試験として、中国広東省恵州市にある恵州ベイブリッジ(全長3km)のマッピングを実施しました。
v1.showcase.level.time1
Livox LiDAR製品のモバイル3Dマッピングにおける大きな可能性を実証するために、香港大学(HKU)のMechatronic and Robotic Systems(MaRS)ラボがLivox LiDARに特化したLiDARオドメトリおよびマッピング(LOAM)のアルゴリズム、LOAM-Livoxを開発しました。LOAMアルゴリズムはオープンソースであり、開発者やLivoxユーザーは無料で利用可能です( https://github.com/hku-mars/loam_livox )
v1.showcase.level.time2
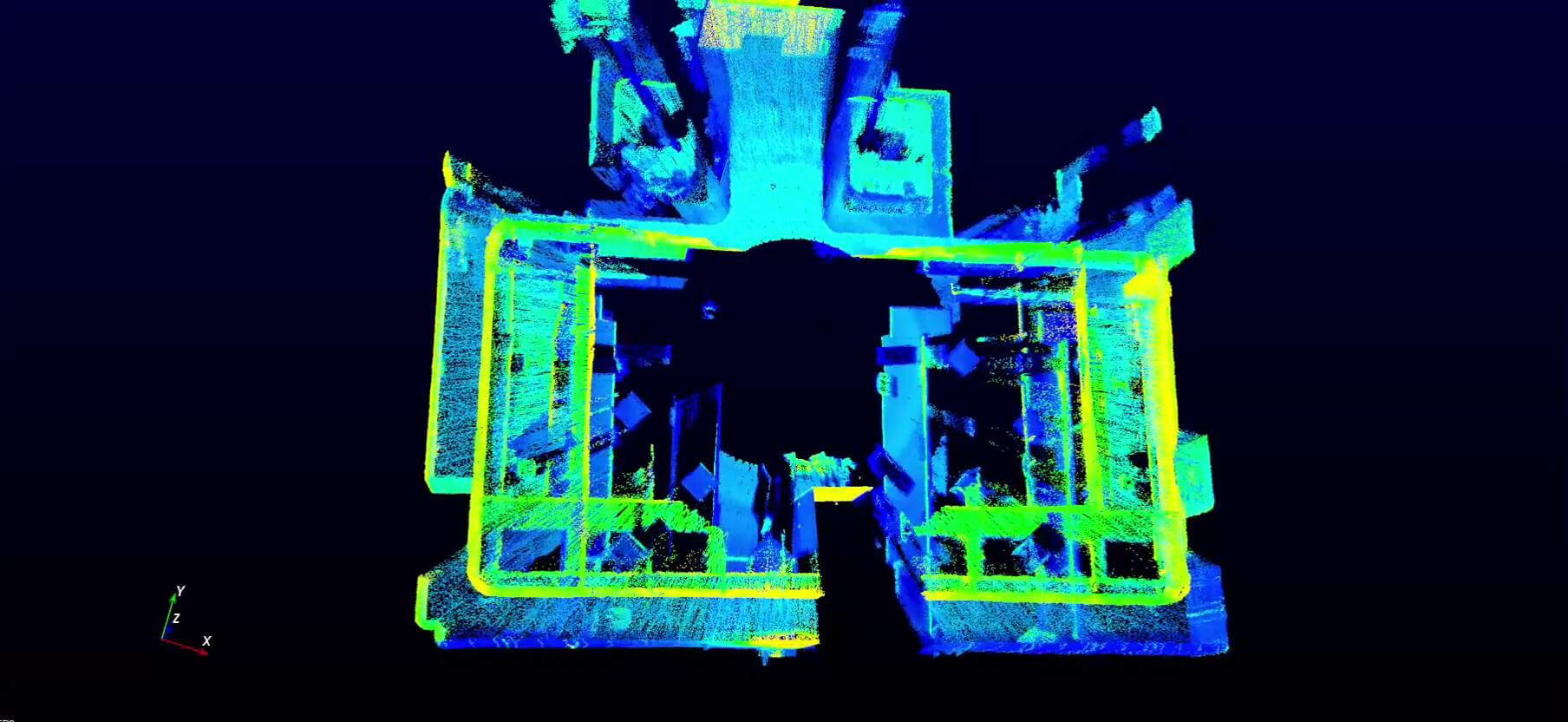
In this case, we use one Mid-40 and the motor mounted on top of a tripod to rotate around the z axis to scan different parts of the room, and integrate the point cloud data to give an overall 3D image.
v1.showcase.level.time3