
Livox Showcase
モバイル3Dマッピング – 香港大学によるLiDARオドメトリおよびマッピングアルゴリズムパッケージ
2019/07/01Livox LiDAR製品のモバイル3Dマッピングにおける大きな可能性を実証するために、香港大学(HKU)のMechatronic and Robotic Systems(MaRS)ラボ(http://web.hku.hk/~fuzhang)がLivox LiDARに特化したLiDARオドメトリおよびマッピング(LOAM)のアルゴリズム、LOAM-Livoxを開発しました。LOAMアルゴリズムはオープンソースであり、開発者やLivoxユーザーは無料で利用可能です( https://github.com/hku-mars/loam_livox )。
LOAM-Livoxは、Livox LiDAR用の安定した低ドリフトな、リアルタイムオドメトリおよびマッピングアルゴリズムパッケージです。Livox LiDARは、大規模な産業用途向けに設計された非常に低コストで高性能なLiDARです。このパッケージは、研究者や開発者が大規模でリアルタイムのモバイルマッピングにLiDARを効率的に使用する場合における多くの課題を取り扱います。それらは非常に限られたFOVでの特徴抽出と選択、安定した異常値除去、動体のフィルタリング、動き歪み補正といった問題です。香港大学MaRSラボでは、複雑な微分幾何学の導出を避けるために、スキャンマッチングにCeres-Solverを使用しています。 コードは、構造化、合理化され、読みやすさと拡張性を向上させています。
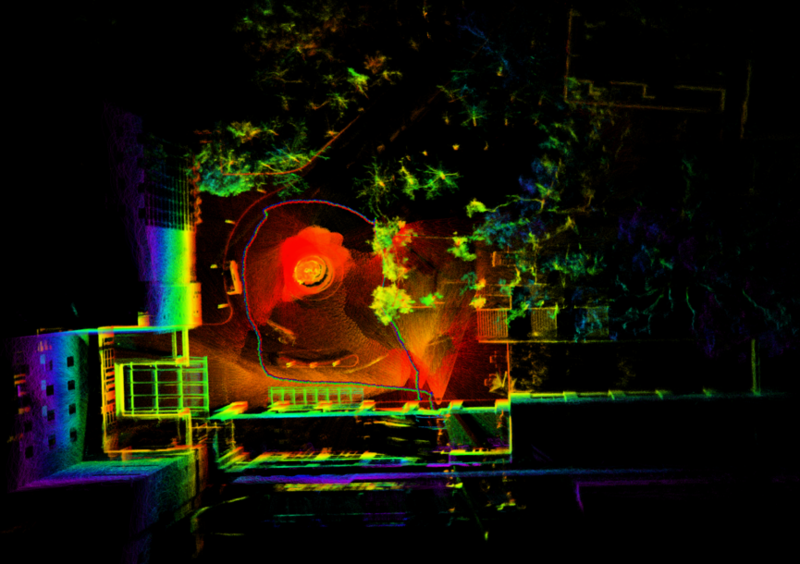
図1 香港大学Chong Yuet Ming文化センターの3Dマップ

図2は、i7コアを搭載したMacBookと1台のLivox Mid-40ユニット、およびLiDARユニットに電力を供給するためのバッテリーからなるシステムコンポーネントです。これらの部品はすべて、手で持つことができる3Dプリンターによる構造物に固定されています。このシステムを持つ人が環境の中を移動しながらデータを収集します。
図2 携帯型LiDARマッピングシステム
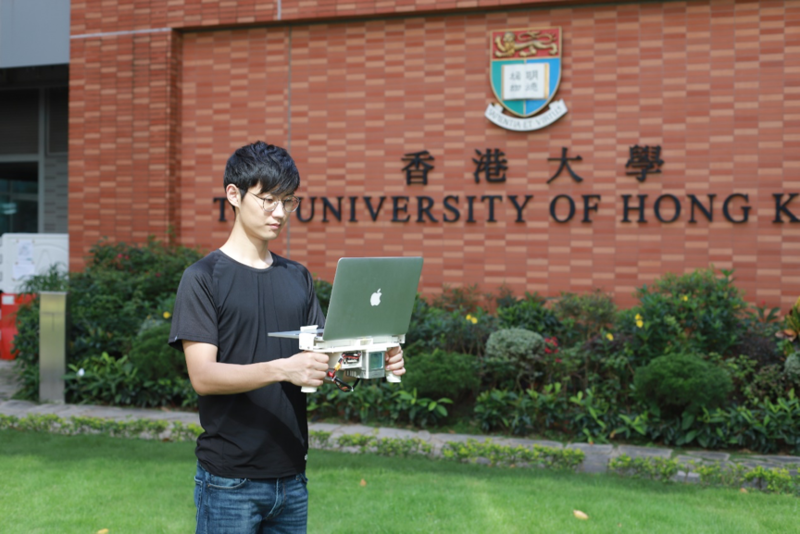
香港大学MaRSラボによって開発されたLOAMアルゴリズムは、1台のMid-40ユニットのみを使用します。 IMU、GPS、カメラなどの他のセンサーは使用しません。 アルゴリズムは、フレーム内動き歪み補償補正を使用して2つの連続したスキャンを照合することによって、LiDARの姿勢体勢の状態をリアルタイム(例:オドメトリ)で計算します。 全ての点は、計算されたLiDARの姿勢そのデータ(例:マッピング)を用いて同じグローバルフレーム内に登録されます。製品の強度と信頼性を向上させるために、非常に限られたFOVでの特徴のデータ抽出と選択、異常値除去、および動体物のフィルタリングなど、多くの重要な問題に対処してきました対応する必要がありました。i7 MacBookでは、オドメトリとマッピングの両方のアルゴリズムが20 Hzでリアルタイムに実行されます。これは、ロボットナビゲーションに適しています。
図3、4、5 香港科技大学(HKUST)メインキャンパスの大規模リアルタイムオドメトリおよびマッピング


1台のMid-40ユニットと1台のコンピューターで、MaRSラボは信頼できる精度で香港科技大学のメインキャンパスをマッピングしました。上記の図が示すように、細部に至るまで容易に見ることができます。1台のLivox Mid-40と開発されたアルゴリズムにより、大規模なモバイルマッピングははるかに手軽に、実現しやすくなりました。
図6 Mid-40ユニットと主な仕様
|
| |
|---|---|
| レーザー波長 | 905 nm |
| 安全等级 | Class 1 (IEC60825-1) |
| 範囲(@100キロルクス) | 90 m @ 10% Reflectivity 130 m @ 20% Reflectivity 260 m @ 80% Reflectivity |
| 距離精度(1σ @ 20 m) | 2 cm |
| 角度精度 | < 0.1° |
| FOV | 38.4° Circular |
| データサイズ | 100k points/s |
| 電力 | 10 W |
| 重量 | Approx. 710 g |
| サイズ | 88×69×76 mm |
| 動作温度 | -20˚C to 65˚C (-4˚F to 149˚F) |

謝辞
Mechatronic and Robotic Systems (MaRS)ラボは、香港大学(HKU)の機械工学科の一部です。 MaRSラボの現在の研究は、LiDARベースの推定とマッピング、ドローン(UAV)の設計、制御、およびナビゲーションに焦点を当てています注力しています。LiDARマッピング画像と追加資料を提供してくださったMechatronic and Robotic Systems(MaRS)のFu Zhang博士と学生のJiarong Linさんに感謝します。