
Showcase
Livox ショーケース - DJI M600に搭載したLivox Mid-40による、UAV 3Dマッピング
2019/4/243DマッピングでのLivox LiDARの優れた可能性を示すデモンストレーションとして、Livox LiDARをドローンに統合してマッピング作業を実施する方法をご紹介します。マッピング試験として、中国広東省恵州市にある恵州ベイブリッジ(全長3km)のマッピングを実施しました。
Livoxは、自動車/ロボット工学/測量などの様々な業界に、低コストで高性能のLiDARセンサーを提供することに尽力しています。すでに発売中のMID-40(価格599ドル)は高性能3D LiDARで、Livoxは、これらを利用いただき、極めて費用対効果の高いLiDAR技術を、ロボット ナビゲーションやマッピングの分野に広めることを目的としています。MID-40主なスペックは、https://www.livoxtech.com/mid-40-and-mid-100/specsでご確認いただけます。以下の表1で、基本スペックをご確認ください。
表1. MID-40の基本スペック
|
| |
|---|---|
| レーザー波長 | 905 nm |
| レーザーの安全性 | クラス 1 (IEC60825-1) |
| 検知範囲(@ 100 klx の背景) | 90 m @反射率10% 130 m @反射率20% 260 m @反射率80% |
| 距離精度 (1σ @ 20 m) | 2 cm |
| 角度精度 | < 0.1° |
| FOV | 38.4° 円形 |
| データ率 | 100k 点/秒 |
| 標準出力 | 10 W |
| 重量 | 約710 g |
| サイズ | 88×69×76 mm |

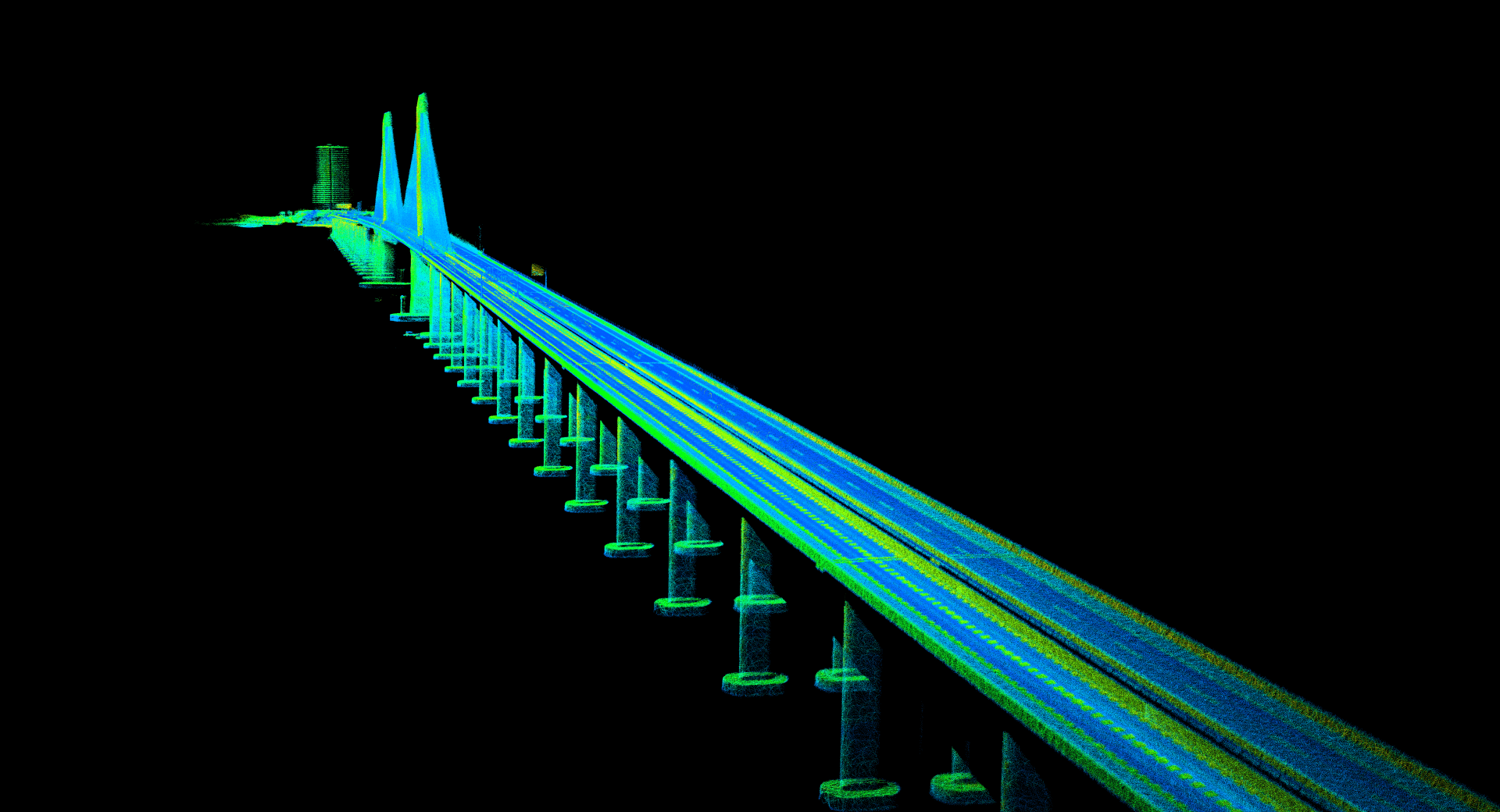
3DマッピングでのLivox LiDARの優れた可能性を示すデモンストレーションとして、Livox LiDARをドローンに統合してマッピング作業を実施する方法をご紹介します。マッピング試験として、中国広東省恵州市にある恵州ベイブリッジ(全長3km)のマッピングを実施しました。マッピング結果を以下に記します。
図1.恵州ベイブリッジをマッピングした点群は、実際の写真のようにきれいに重なっています。

(a)
(b)
Livox MID-40ユニット1台を、高品質の姿勢測定が可能なInertial Sense社(https://inertialsense.com/products/gnss-ins-rtk-sensors/) のGNSS-INSセンサーと統合することから開始します。cmレベルの測位サービスを提供するため、RTKユニットとINSセンサーを併用します。また、相対的な動きを避けるために、Livox MID-40とINSセンサーはしっかりと接続されています。Raspberry Pi の内臓マイコンを使用して、MID-40データとINS測定値をリアルタイムで処理します。Livox LiDARは、外付けのINS/RTKに対応し、ハードウェアレベルの時間同期とフトウェアレベルのセンサーデータ融合を実現しています。Livox LiDARを、INS/RTKおよびデータ処理と統合するための詳細な手順は、https://github.com/Livox-SDK/LivoxIntegration でご確認いただけます。
図2.このセットアップで使用された主な構成部品
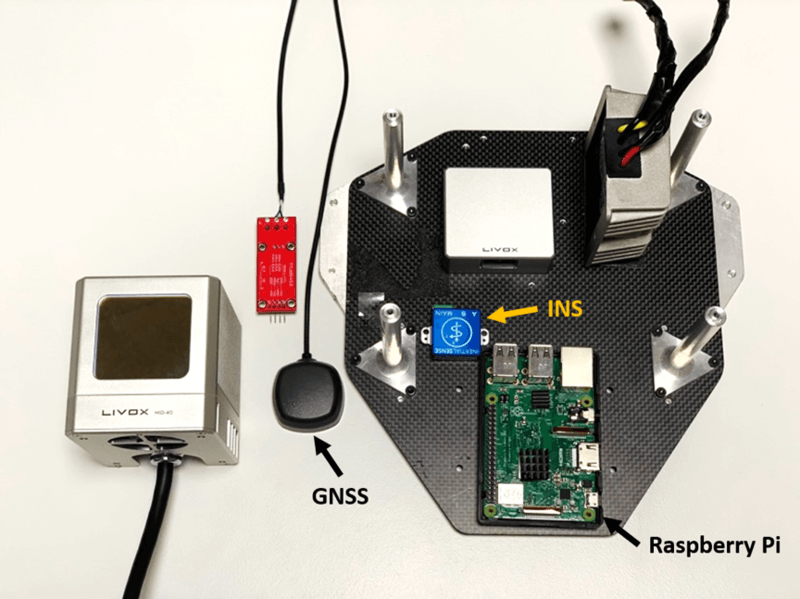
図3.M600ドローンに搭載されたMID-40

ドローン飛行中のLiDARの動き(回転と並進移動の両方)を補正するため、INSとGNSSが必要です。ドローン自体もフライトコントローラー内にIMUを搭載していますが、通常、いくつかのダンパーによってドローンの機体、つまり、LiDARセンサーから絶縁されており、プロペラの回転や様々なドローンモードによる振動を吸収します。IMUの防振絶縁は有益で、ドローン制御には必要な場合もあります。ですが、センサー融合やマッピングなどのアプリケーションでは、振動を含む可能性のあるLiDARの全ての動きを測定する必要があります。
今回使用したドローンは、DJI M600ですが、MID-40のサイズと重量では、M200、M210(RTK)、そして、最新モデルM200 V2.0のような、より小型なドローンでも取り扱えます。機械的統合により、Livox MID-40は様々な取り付けの選択が可能となり (Livox MID-40 クイックスタートガイドを参照)、Livox MID-40は単純な機械的部品を用いてDJI M600に簡単に取り付けられます。電子ハードウェア統合のため、DC-DC電圧レギュレータを使用して、ドローンのバッテリー電圧(22V)をMID-40入力電圧(10V~16V)とRaspberry Pi入力電圧(5V)に電圧を降圧させます。
マッピング作業中、ここで使用されているINSセンサーによって制限されているので、ドローンと橋の間の距離は約50mとなっています。この距離以上になると、INSセンサーが原因の姿勢測定誤差が増幅されるため、長くなるほどポイント精度が低下する可能性が高くなります。ハイグレードのINS(APX-20やNovAtelのSPANなど)を使用すると、距離が長くなり、データ収集はより効率的になります。今回の恵州ベイブリッジの場合では、データ収集プロセスは1台のMID-40で半日かかり、後処理は30分未満で行えます。
RTK測定を含むすべてのLiDARデータとINS測定は、Raspberry PiのmicroSDカードに保存されます。保存されたデータを使用すると、後処理はINSセンサーで測定された回転と並進移動を、LiDARデータに適用するのと同様に簡単で、すべてのポイントデータが地球のフレームに投影され、地図が作成されます。
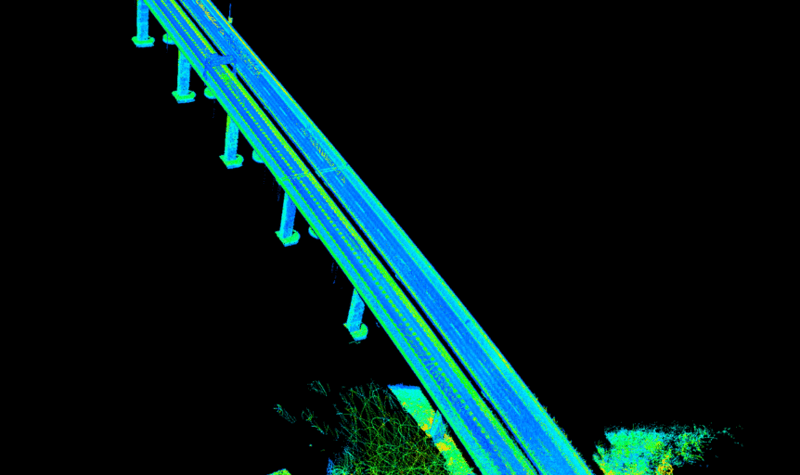
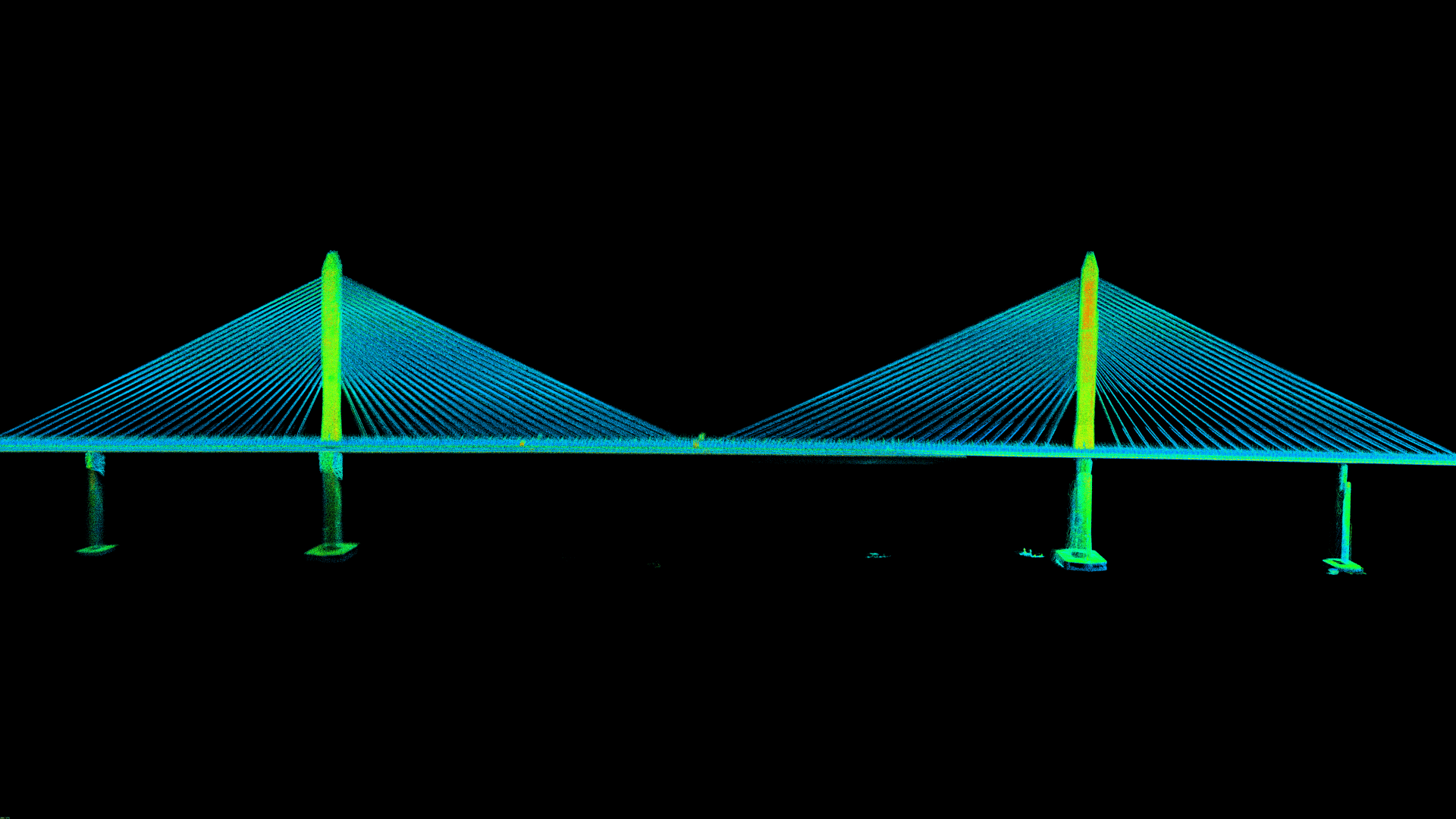
図4 さまざまな角度からマッピングされた橋
(a)
(b)
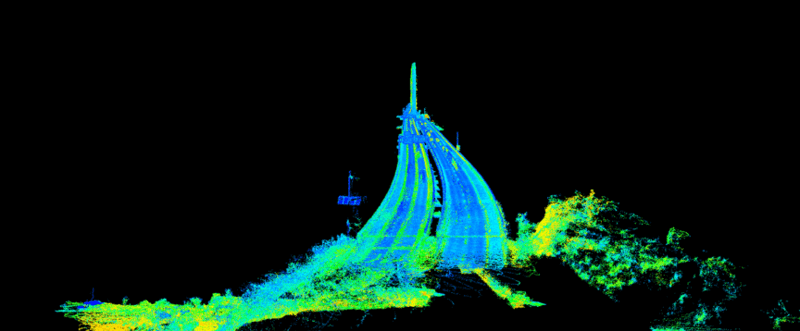
(c)
図4に示すように、MID-40を1台使用して、橋全体を細部まで細かくマッピングしました。斜張ケーブルはそれぞれ十分に分離されて表示され、橋の道路上の車線もはっきりと見えます。Livox LiDARを使用することにより、空撮マッピングの作成はこれまで以上に効率的になり、コストも抑えることができます。ここに示されている事例では、あくまで一例で、より高度なINSや、より洗練された後処理アルゴリズムSLAM、または、開発者が提供する別のソリューションを使用することにより、マッピング精度をさらに向上させることができます。将来的に、可能性に満ちた弊社のLivox LiDARが、これらの分野に最高の成果を生み出す日も近いことでしょう。