
Livox Showcase
Mobile 3D Mapping - LiDAR Odometry and Mapping Algorithms Package from HKU
2019/07/01To demonstrate the enormous potential of Livox LiDAR products in mobile 3D mapping, the Mechatronic and Robotic Systems (MaRS) laboratory ( http://web.hku.hk/~fuzhang ) in the University of Hong Kong (HKU) has developed a LiDAR odometry and mapping (LOAM) algorithm specifically for Livox LiDARs – LOAM-Livox. The LOAM algorithms are open source and are available for free for the benefit developers and customers ( https://github.com/hku-mars/loam_livox ).
LOAM-Livox is a robust, low drift, and real time odometry and mapping algorithms package for Livox LiDARs, the significant low cost and high performance LiDARs that are designed for massive industrials uses. This package addresses many key issues when researchers and developers want to efficiently use LiDAR for large-scale, real-time mobile mapping: feature extraction and selection in a very limited FOV, robust outliers rejection, moving objects filtering, and motion distortion compensation. The HKU MaRS Lab uses Ceres-Solver for scan matching to avoid complicated differential geometry derivation. The codes are well structured and streamlined to improve readability and extendibility.
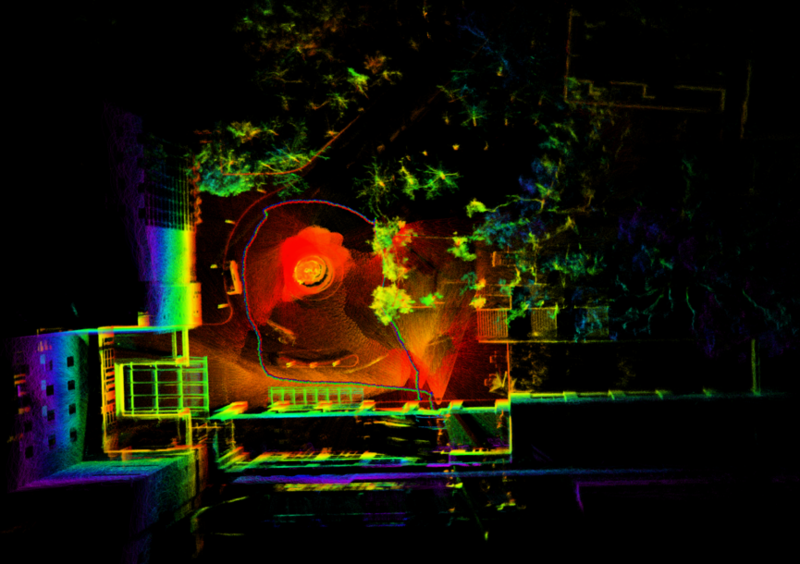
Figure 1. The 3D map of the Chong Yuet Ming Cultural Centre in the University of Hong Kong.

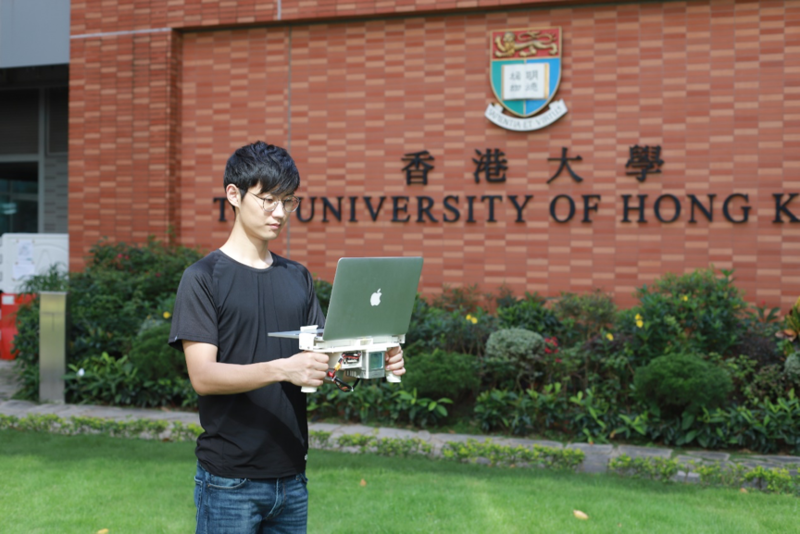
Figure 2 shows the system components, including a MacBook with i7 core, a single Livox Mid-40 unit, and a battery to power the LiDAR unit. All of these components are secured on a 3D printed structure that can be held by hand. The data is collected by a person carrying this system while moving around the environment.
Figure 2. The handheld LiDAR mapping system.
The LOAM algorithm developed by the HKU MaRS Lab uses only a single Mid-40 unit. No other sensors such as IMU, GPS, or cameras are used. The algorithms calculate the LiDAR poses in real time (i.e., odometry) by matching two consecutive scans using inner-frame motion distortion compensation. All points are registered within the same global frame with the calculated LiDAR poses (i.e., mapping). To improve the product strength and reliability, many key issues have been addressed, including feature extraction and selection in a very limited FOV, outlier rejection, and the filtering of moving objects. With the i7 MacBook, both the odometry and mapping algorithms run in real time at 20 Hz, which is suitable for robotic navigation.
Figure 3, 4, 5. Large-scale real-time odometry and mapping of the Hong Kong University of Science and Technology (HKUST) main campus.


With a single Mid-40 unit and a computer, the MaRS lab has mapped the HKUST main campus with reliable accuracy. As the above figures illustrate, even minute details are easily visible. With a single Livox Mid-40 and the developed algorithms, large-scale mobile mapping has become much more affordable and easier to accomplish.
Figure 6. Mid-40 unit and basic specs.
|
| |
|---|---|
| Laser Wavelength | 905 nm |
| Laser Safety | Class 1 (IEC60825-1) |
| Detection Range (@ 100 klx Background) | 90 m @ 10% Reflectivity 130 m @ 20% Reflectivity 260 m @ 80% Reflectivity |
| Distance Precision (1σ @ 20 m) | 2 cm |
| Angular Accuracy | < 0.1° |
| FOV | 38.4° Circular |
| Data Rate | 100k points/s |
| Typical Power | 10 W |
| Weight | Approx. 710 g |
| Dimension | 88×69×76 mm |
| Operating Temperature | -20˚C to 65˚C (-4˚F to 149˚F) |

Acknowledgments
The Mechatronic and Robotic Systems (MaRS) lab is a part of the Department of Mechanical Engineering at the University of Hong Kong (HKU). The current research of the MaRS lab focuses on LiDAR-based estimation and mapping, unmanned aerial vehicles (UAVs) design, control, and navigation. We would like to thank Dr. Fu Zhang and his student Mr. Jiarong Lin of the Mechatronic and Robotic Systems (MaRS) for providing us with LiDAR mapping images and additional materials.