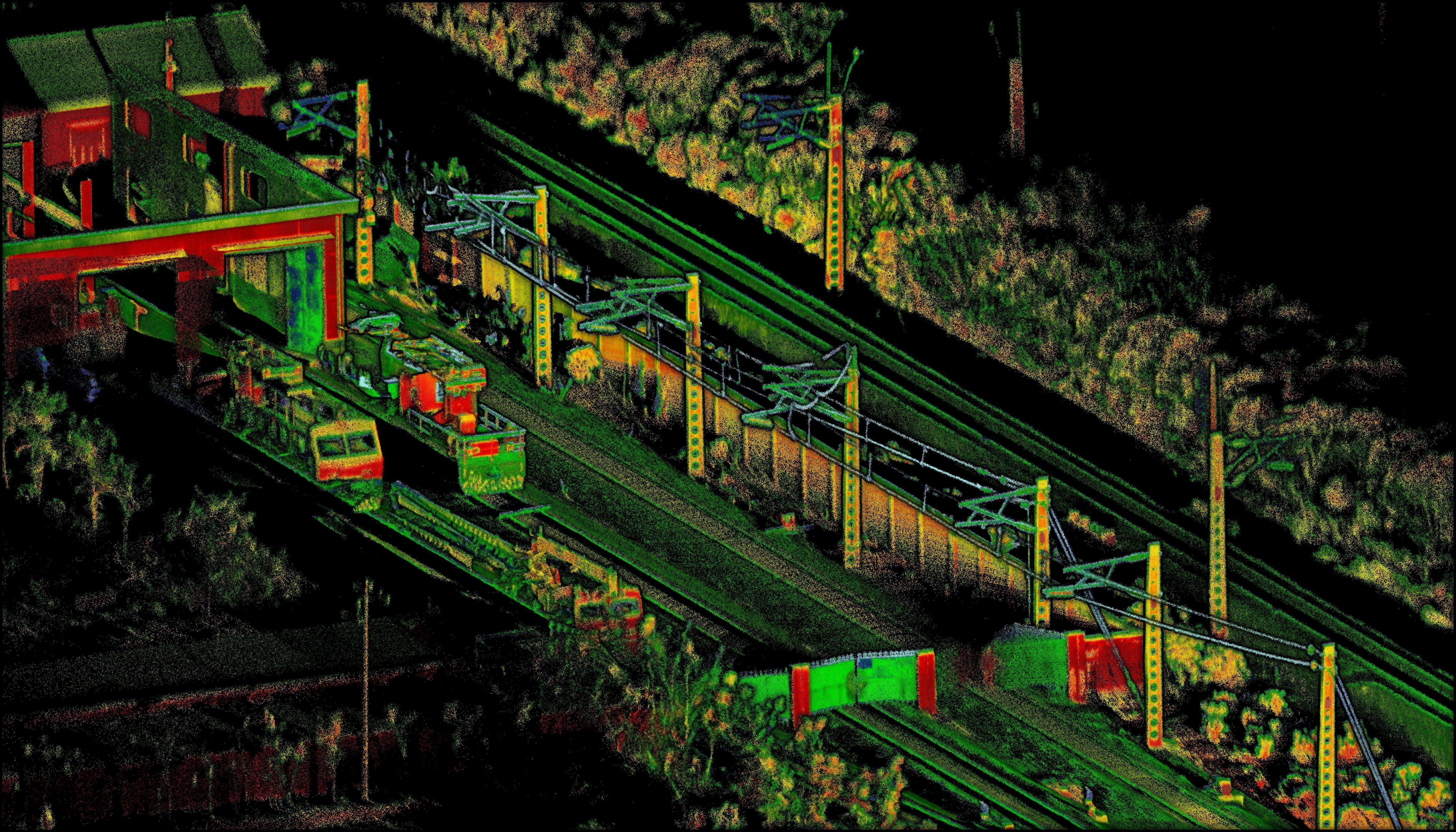
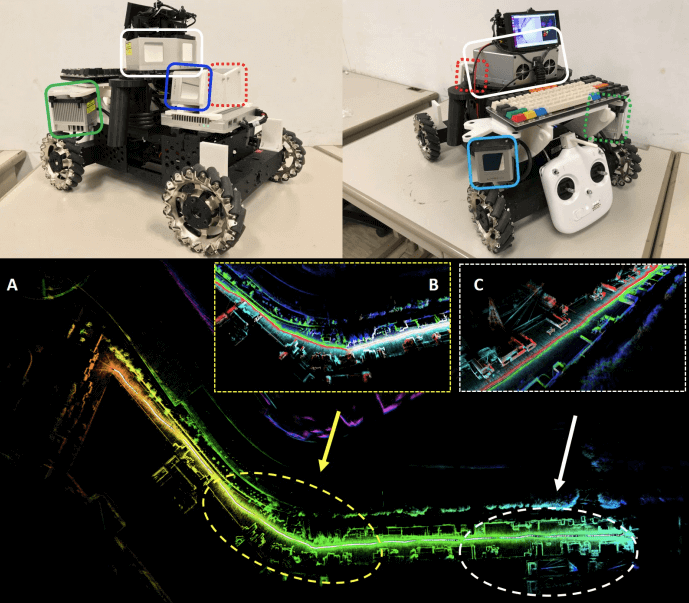
Mid-360 LiDAR Enables Autonomous Navigation and High-Speed Drone Flight
With the advanced perception capabilities of the Mid-360 LiDAR, SUPER can efficiently detect and avoid thin obstacles such as wires, and is also able to autonomously navigate in dark environments.
2026-03-11