
应用案例
移动三维建图 – 附香港大学测距和建图开源算法
2019/07/01激光雷达作为新一代测绘利器,在移动三维建图中有着巨大的潜力。使用激光雷达可以快速构建周围环境的3D地图,具有测量精度高、方向性好等优点,且不易受周围环境光、雨尘等影响。针对此专题,香港大学MaRS实验室(web.hku.hk/~fuzhang) 使用了Livox Mid-40激光雷达,并开发出一种针对性的测距和建图算法—LOAM-Livox。
LOAM-Livox 算法采用开源代码,供开发者免费使用(https://github.com/hku-mars/loam_livox)。
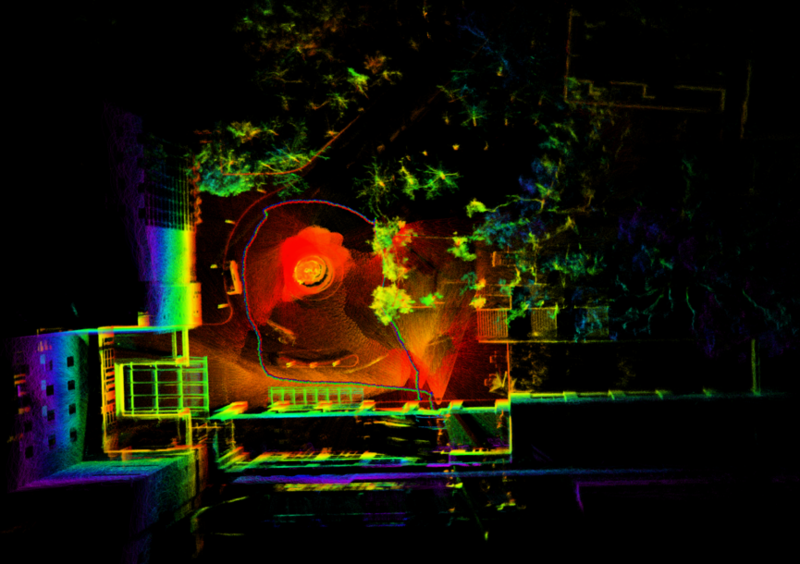
我们先来看看实测效果图。
图 1 香港大学莊月明文化中心3D点云图

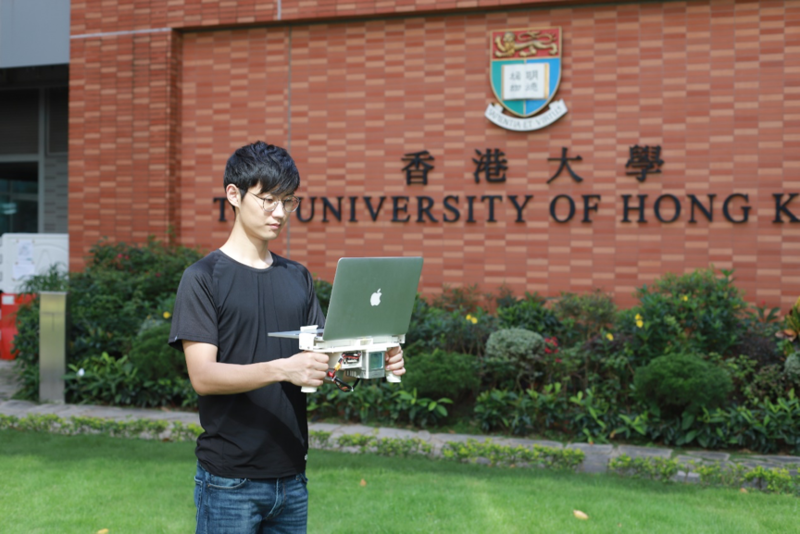
图 2 展示了该系统的全部组成,包括一台配备 i7 处理器的 MacBook、一个 Livox Mid-40 单元和一块供电电池。这些设备通过 3D 打印支架进行固定,便于手持操作。单人手持该系统在目标区域走动即可采集数据。
图 2 手持 LiDAR 测绘系统
该LOAM 算法仅使用一个 Livox Mid-40 单元,没有融合其他传感器如 IMU、GPS 或摄像头。通过运动补偿机制进行连续扫描匹配,从而实现 LiDAR位姿的实时解算(即测距)。有了LiDAR位姿, 所有LiDAR测量的点云就可以投影到同一个全局坐标系中, 得到环境的三维地图。为提升算法性能和可靠性,一系列核心问题得以解决,包括有限视场下的特征提取和筛选、杂点剔除、移动物体过滤以及帧内运动补偿。该算法的测距和建图部分均可以同时在MacBook上以 20 Hz 的频率实时运行。
仅凭一个 Livox Mid-40 和一台手提电脑,MaRS 实验室就完成了香港科技大学主校区的高精度三维地图测绘,如下图示,即便是细微的细节也清晰可见。这一解决方案也大大降低大范围移动测绘的成本和门槛。
更多实测图如下。
图 3、4、5 香港科技大学主校区大范围测距和建图


附 Livox Mid系列 的基本参数表
|
| |
|---|---|
| Laser Wavelength | 905 nm |
| Laser Safety | Class 1 (IEC60825-1) |
| Detection Range (@ 100 klx Background) | 90 m @ 10% Reflectivity 130 m @ 20% Reflectivity 260 m @ 80% Reflectivity |
| Distance Precision (1σ @ 20 m) | 2 cm |
| Angular Accuracy | < 0.1° |
| FOV | 38.4° Circular |
| Data Rate | 100k points/s |
| Typical Power | 10 W |
| Weight | Approx. 710 g |
| Dimension | 88×69×76 mm |
| Operating Temperature | -20˚C to 65˚C (-4˚F to 149˚F) |

声明
MaRS 实验室( http://web.hku.hk/~fuzhang) 是香港大学机械工程学院的一部分。目前 MaRS 实验室的研究重点是基于 LiDAR测距和建图,无人机(UAV)设计、控制和导航。感谢张富博士和他的学生林家荣先生为我们提供 LiDAR 测绘图像及其他材料。